第三者による記述のため、情報に誤りがある場合があります。誤りがあった場合はコメントでお知らせ頂けると幸いです。
¶ ATSAssistMod解説
こちらも参照:https://github.com/Kai-Z-JP/ATSAssistMod/blob/1.7.9/document/ATSAssistMod1.4.0_Manual.pdf
¶ ATSAssistModとは
ATSAssistMod、通称「ATSA」は、Kaiz_JP氏によって開発された、RealTrainModの保安装置を簡単に構築できるようになるModです。
基本的な速度制限のほか、TASC(定位置停止支援装置)、ATO(自動列車運転装置)、ATACS(移動閉塞)の構築が可能となっており、他のシステムと組み合わせることで運転補佐から完全自動運転まで実現可能な高い汎用性を持っています。
Cauldron系サーバー(ThermosやMohist等)の場合、
tileentities.yml内のskip-tileentity-ticksをfalseに変更する必要があります。trueの場合、TASC等が作動しない・ズレることがあります。
¶ 対応バージョン
- Minecraft 1.7.10
- Minecraft 1.12.2
¶ リンク
GitHub:https://github.com/Kai-Z-JP/ATSAssistMod/tree/master
¶ ATSAssistModで追加されるアイテム
ATSAssistModでは2種類のブロック、1種類のアイテムが追加されます。
¶ ブロック
- 保安装置ブロック
- IFTTTブロック
¶ アイテム
- 車上保安装置切り替えSW
¶ アイテム解説
¶ 共通事項
バールを持つと、ブロックからビーコンビームが射出されます。場所がわかりやすい!
保安装置ブロック、IFTTTブロックはまとめて「地上子」と呼ばれることもあります。
保安装置ブロック / IFTTTブロックが反応する位置は車両の中心です。
車両の中心直下、3×3×3ブロック以内にあるブロックに反応します。
別に指定がない場合、先頭車両のみに反応します。
¶ 保安装置ブロック
¶ 設置方法
線路直下、高さ3ブロック以内に設置してください。
¶ 使用方法
ブロックを右クリックすると次のような画面が開きます
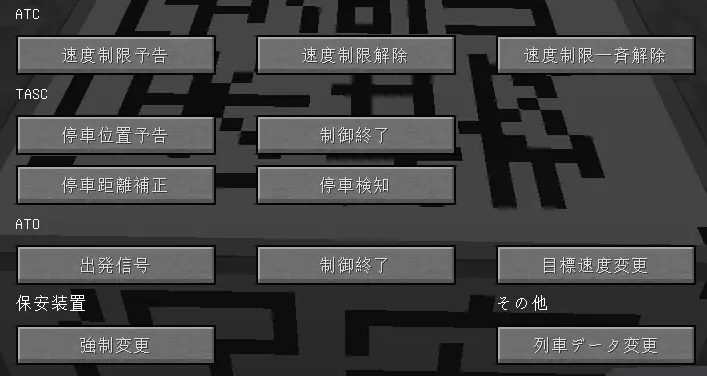
1つのブロックに対して1つの機能を割り当てることができます。
¶ 各種機能解説
¶ ATC
車両の速度を制限します。なお、速度制限は上書きではなく、上乗せされていきます。
速度制限は、かけられている制限の中で一番低い速度が採用されます。
¶ 速度制限予告
その場、もしくは指定の場所から車両の速度を制限します。
- レッドストーン連動:チェックを入れると、動作にレッドストーン信号入力が必要になります。
- 速度制限(km/h):制限速度を指定します。車両はこの速度まで減速します。
- 制限開始の距離(m):速度制限を開始する距離を相対距離で指定します。例えば、10.0と設定すると保安装置ブロックの10m先から速度制限がかかります。また、制限開始地点までに、自動的に制限速度まで減速します。 <解説画像を貼付予定>
- 自動的に減速する:不明。 分かり次第書きます。
- 距離基準を車両先頭に:チェックを入れると、制限開始距離の開始地点を車両がブロックを通過した時点の車両先頭(おそらく台車)から計算します。
例えば、20m車体で、制限開始の距離を10mとした場合、10m/2(車体長の半分)+10m=20m、保安装置ブロックの約20m先から速度制限が開始します。<比較画像を貼付予定>
¶ 速度制限解除
車両にかかった速度制限のうち、一番古いものを解除します。
- レッドストーン連動:チェックを入れると、動作にレッドストーン信号入力が必要になります。
- 編成最後尾で解除:チェックを入れると、編成最後尾の車両の中心がブロック上を通過したときに速度制限が解除されます。
¶ 速度制限一斉解除
車両にかかった速度制限を全て解除します。
- レッドストーン連動:チェックを入れると、動作にレッドストーン信号入力が必要になります。
¶ TASC
指定した停車位置に車両を自動で停車させます。(距離が短いとさすがにオーバーランします)
停車位置予告1つだけでは精度は低いですが、停車位置手前などに停車距離補正を置くと精度が高くなります。
また、カーブ駅では停車距離補正を設置することを推奨します。
¶ 停車位置予告
指定した停車位置に車両を自動で停車させます。
距離の精度が低いため、「停車距離補正」の併用を推奨します。
- レッドストーン連動:チェックを入れると、動作にレッドストーン信号入力が必要になります。
- 停車位置までの距離:車両を止める位置をブロックからの相対距離で指定します。例:10.0 → 保安装置ブロックから10mの位置に停車させる。
- 距離基準を車両先頭に:チェックを入れると、停車位置を車両が保安装置ブロックを通過した時点の車両先頭(おそらく台車)の位置から計算します。
例:20m車体で、停車位置までを10mとした場合、20m/2(車体長の半分)+10=20m、保安装置ブロックから約20mの位置が停車位置になります。
¶ 制御終了
車両が保安装置ブロックを通過すると、その車両のTASC制御を強制的に終了します。
なお、TASCは停車時に自動で終了するため、停車位置直下への設置は不要です。
折り返し駅などの、同一線路を双方向で使うが、片方だけにTASCを効かせたい時に有効です。
- レッドストーン連動:チェックを入れると、動作にレッドストーン信号入力が必要になります。
¶ 停車距離補正
停車位置までの距離を補正します。停車位置手前やカーブ駅に設置することを推奨します。
この機能は、車両にTASC制御が働いている場合にのみしか動きません。
- レッドストーン連動:チェックを入れると、動作にレッドストーン信号入力が必要になります。
- 停車位置までの距離:車両を止める位置をブロックからの相対距離で指定します。例:10.0 → 保安装置ブロックから10mの位置に停車させる。
- 距離基準を車両先頭に:チェックを入れると、停車位置を、車両が保安装置ブロックを通過した時点の車両先頭(おそらく台車)の位置から計算します。例:20m車体で、停車位置までを10mとした場合、20m/2(車体長の半分)+10=20m、保安装置ブロックから約20mの位置が停車位置になります。
¶ 停車検知
車両が停車している(0km/hである)ことを検知して、両数分の信号強度のレッドストーン信号を連続出力します。
出力されたレッドストーン信号はコンパレーターで取り出すことができます。
- 逆転ハンドル前以外でも検知:チェックを入れると、逆転ハンドルが前でない車両にも反応します。
¶ ATO
指定した目標速度(正確には目標速度-2km/h)まで車両を自動で加速させ、目標速度を維持(目標速度-10km/h以下になった時、目標速度まで加速)させます。
なお、目標速度を下げても自動で減速しないため、減速させる場合、ATCとの併用が必要です。
TASCや列車データ変更と組み合わせることで、いわゆる無人自動運転というものになります。
逆転ハンドルが前でないと動きません。
¶ 出発信号
車両を目標速度まで自動で加速させ、目標速度で維持させます。レッドストーン連動をオンにしない場合、常にATO信号が出されます。
- レッドストーン連動:チェックを入れると、動作にレッドストーン信号入力が必要になります。
- 目標速度:ATOの速度を指定します。
例:〈設定値:10〉→ 10km/hまで車両を加速・維持させる。
¶ 制御終了
車両のATO制御を終了させます。
- レッドストーン連動:チェックを入れると、動作にレッドストーン信号入力が必要になります。
¶ 目標速度変更
車両の目標速度を変更します。
元より低い速度を指定しても車両は減速せずに惰行します。減速させる場合、ATCの併用が必要です。
- レッドストーン連動:チェックを入れると、動作にレッドストーン信号入力が必要になります。
- 目標速度:ATOの新しい速度を指定します。
例:〈設定値:50〉→ 目標速度を50km/hに変更し、50km/hまで加速・維持させる。
¶ 保安装置
¶ 強制変更
車両の保安装置を強制変更します。
- レッドストーン連動:チェックを入れると、動作にレッドストーン信号入力が必要になります
2段目の目盛りで変更先の保安装置を指定します。なお、保安装置は以下の6種類のうち1つを指定できます。
- 開放(デフォルト)
- 構内
- ATACS
- ATS-Ps
- R-ATS
- Rn-ATS
¶ その他
¶ 列車データ変更
車両の状態を変更します。
動作させるためにはレッドストーン信号入力が必要です。
変更できるパラメーターは以下の通りです。
- 方向 :変更なし / 0 / 1
- 信号 :変更なし / -1~127
- ドア :変更なし / 両側閉 / 右側のみ開 / 左側のみ開 / 両側開
- パンタグラフ :変更なし / 下げ / 上げ
- 方向幕 :変更なし / 0~127
- 逆転ハンドル :変更なし / 前 / 切 / 後
- ノッチ :変更なし / -8~5
- 前照灯 :変更なし / 前照灯OFF / 前照灯ON / 前照灯・尾灯ON
- チャンクローダー:変更なし / 0~8
- 車内放送 :変更なし / 0~127
- 車内灯 :変更なし / OFF / ON /
GamingRainbow - 逆転ハンドル前以外でも検知:逆転ハンドルが前以外の車両直下でも効果を発揮するようになります。
¶ IFTTTブロック
¶ 設置方法
線路直下、高さ3ブロック以内に設置してください。
¶ 使用方法
ブロックを右クリックすると次のような画面が出ます
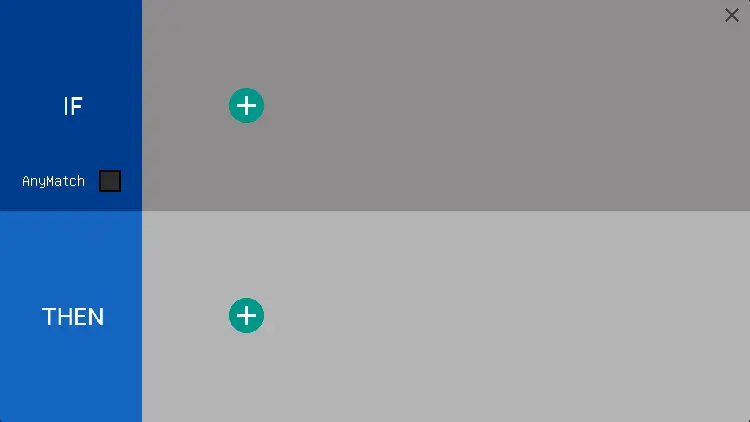
IF THENそれぞれ (+) を押すことで項目を追加することができます
1つに対して複数のIFとTHENを割り当てることができます。
¶ 各種機能解説
¶ 定義
連続で実行:指定されたものを、条件を満たしている間、常に実行する。(リピート設定のコマンドブロックのような感じ)
一度だけ実行:指定されたものを、条件を満たした瞬間に一回だけ実行する。
¶ IF
後述するTHENが動作する条件を指定します。条件は複数登録することができます。
通常、IFに登録された条件が全て満たされなければTHENが実行されませんが、AnyMatchにチェックを入れると、IFに設定された条件のうち、1つでも満たせば動くようになります。
IFで設定できる条件は以下の通りです。

¶ RS信号入力
Input:「ON / OFF」
説明…いらないよね?
¶ 単純列車検知
動作モード:「全車 / 先頭車 / 最後尾 / レール内」
全車 : 編成内いずれかの車両の中央がブロック直上にいるときに満たす
先頭車 : 編成の先頭車の車両の中央がブロック直上にいるときに満たす
最後尾 : 編成の最後尾の車両の中央がブロックの直上にいるときに満たす
レール内: ブロック直上のレール(マーカーの始端から終端まで)のどこかに車両の中央があるときに満たす
¶ 両数
Cars : 「>= / < / <= / != / == / >」「整数値」
>= : 編成の両数が
整数値以上のとき
< : 編成の両数が整数値未満のとき
<= : 編成の両数が整数値以下のとき
!= : 編成の両数が整数値以外のとき
== : 編成の両数が整数値と同じとき
> : 編成の両数が整数値をこえるとき
整数値には負の数も入力できちゃいます。使い道はあるのだろうか…
¶ 速度
Speed:「>= / <=」「整数値」
>= : 編成の両数が
整数値以上のとき
<= : 編成の両数が整数値以下のとき
速度も整数値に負の数を入力できます。使い道は(ry
¶ TrainDataMap
DataType:「Boolean / Double / Int / String / Vec / Hex」
Key : 自身で指定
Value : DataTypeによって異なる
直上の車両のDataMapと照らし合わせて、指定した条件が満たされているかどうかを判別します。
¶ TrainDirection(Yaw)
Train Heading:「NORTH / EAST / SOUTH / WEST」
直上の車両が指定した方角に向かって走っているときに条件を満たします。
Pre-Release 1.8.0-rc.1以降かつVer1.7.10限定の機能です
¶ 踏切障検
始点:「X座標」「Y座標」「Z座標」
終点:「X座標」「Y座標」「Z座標」
始点座標から終点座標までの立体空間の中にエンティティがいるときに条件を満たします。
座標は小数点以下切り捨て(x.0に統一)されています。
そのため、「始点:X0,Y50,Z0 / 終点:X0,Y51,Z50」の場合、X0.0,Y50.0~51.0,Z0.0~50.0にいるエンティティを検知することになるので、X軸は、0.0という軸上にエンティティがいないと検知しません。
もし、X方向の幅1ブロックで検知したい場合、始点:X0,~~ / 終点:X1(もしくはX-1)~~ のように「始点に±1」しなければいけないということです。
¶ THEN
前述したIFが満たされたときの動作を設定します。動作は複数設定することができます。なお、THENに登録された動作は、原則「一部だけ実行する」ことはできません。IFが満たされたとき、すべて同時に実行されます。
より柔軟な動作をさせたいならば、JavaScriptを活用するのが良いでしょう。
THENで設定できる条件は以下の通りです。
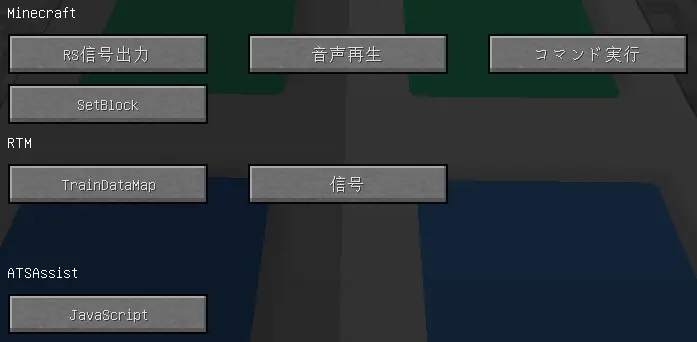
¶ RS信号出力
両数出力:「無効/有効」(検知した編成の両数に対応した信号レベルを出力する。1両→レベル1、2両→レベル2)
出力レベル:「整数値」
本来RS信号のレベルは0~15だが、出力レベルにはこの範囲外の整数も入力できてしまう。
¶ 音声再生
一度のみ再生:「チェックボックス」
音声名:「文字列」
半径:「整数値」
X:「整数値」
Y:「整数値」
Z:「整数値」
音声名、半径、X、Y、Zは/playsoundコマンドと同じように入力します。なお、半径には小数をいれられません。
音声は一度だけ流れます。Question No.1!
バグなのか、
一度のみ再生にチェックを入れることはできません。
¶ コマンド実行
一度のみ実行:「チェックボックス」
DisplayName:「文字列」
コマンド:「文字列」
設定されたコマンドを連続で実行します。
一度のみ実行にチェックを入れると、IFを満たしたとき、連続で実行せずに1度だけ実行します。
DisplayNameはIFTTTの設定画面上に表示するラベル名を設定します。
コマンドはコマンドブロックと同じ形式で入力できます。
¶ SetBlock
一度のみ実行:「チェックボックス」
X:「整数値」
Y:「整数値」
Z:「整数値」
id:「整数値」
meta:「整数値」
指定された座標に指定されたブロックを連続で設置します。
一度のみ実行にチェックを入れると、IFを満たしたとき、連続で設置せずに1度だけ設置します。
idは数字IDで入力。例えば、RSブロックなら152を入れる。
¶ TrainDataMap
DataType:「Boolean / Double / Int / String / Vec / Hex」
Key : 自身で指定
Value : DataTypeによって異なる
直上の車両のDataMapを変更します。
¶ 信号
SignalLevel:「整数値」
指定したレベルのRTM信号を直上の車両に対して発します。
¶ JavaScript
Script Name:「文字列」
Script Text:「文字列」
Script NameはIFTTTの設定画面上に表示するラベル名を設定します。
Script Text実行するスクリプトを設定します。
Release 1.7.9ではJavaScriptを登録できないバグがあります。(Pre-Release 1.8.0-rc.1より修正済)
〈お役立ちLink〉
放送パーツを組み合わせて流すスクリプトの例
¶ 車上保安装置切り替えSW
¶ 使用方法
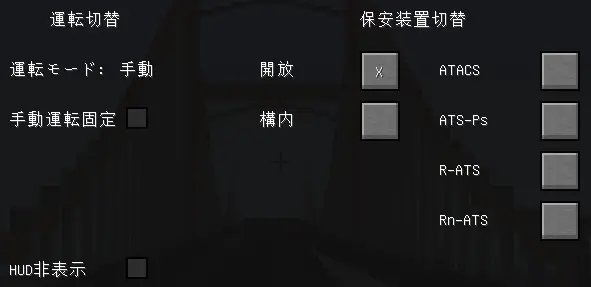
運転席に乗って右クリックすると次のような画面が出ます。
¶ 各種機能解説
¶ 運転切替
¶ 運転モード
何もないと「運転モード:手動」表示
ATO・TASCが作動していると「運転モード:TASC/ATO」表示
¶ 手動運転固定
チェックを入れると、ATO、TASCを無効にします。
この機能が有効になっている間、ATO、TASCは赤文字になります。
¶ 保安装置切替
- 開放(デフォルト)
- 構内
- ATACS
- ATS-Ps
- R-ATS
- Rn-ATS
いずれか1つに設定することができます。
¶ その他
¶ HUD非表示
チェックを入れると、ATO、TASC、ATC(Limit)の表示を運転台HUDから消します。
見えないだけで、ちゃんとATOなどの機能は働きます
¶ よくあるQ&A
¶ Q. 保安装置ブロック(IFTTTブロック)が反応しない
A1. ブロックは線路直下3ブロック以内に置いてありますか?ブロックは線路直下3x3x3の範囲に無いと反応しません。また、ブロックは原則車両の中心に反応します。台車には反応しません。
A2. マルチプレイの場合、ラグによって検知できなかった場合もあります。サーバーのconfigをいじること[1]で多少改善させることができます。
¶ Q.停車検知、IFTTTブロック(RS信号出力)のRS信号が出力されない
A. 出力をコンパレーターで受け取っていますか?それらブロックからのRS信号出力は、コンパレーターでないと受け取ることができません。
¶ Q.運転中だけどATC/ATO/TASCを強制的に全て切る方法ある?
A. レバーサー(逆転ハンドル)を一回「中」にして「前」に戻すだけ!
¶ Q. 速度制限予告による自動減速で、ノッチがめちゃ荒ぶる
A. 仕様です。
¶ Q. 制限速度解除を設定したのに、制限が残っている
A. 速度制限予告と対になるように制限速度解除は設置していますか?制限速度解除は一番古い制限速度のみを解除するので、速度制限をかけた回数分、速度制限解除を設置する必要があります。また、速度制限一斉解除を設置することで、かかっている速度制限を全て解除することもできます。
¶ Q. TASCのブレーキが強すぎる
A. TASC開始地点をより手前にすると良いでしょう。
¶ Q. TASCの停止位置がずれる
A. 「停車位置予告」1つだけでは精度が悪いので、「停車距離補正」を活用しましょう。5m前、10m前、100m前のように複数置くと良いでしょう。
¶ Q. ATOが働かない
A. レバーサー(逆転ハンドル)は「前」にしていますか? ATOは「前」でないと有効になりません。
¶ Q. ATOが勝手に働く
A. 保安装置ブロック「出発信号」のレッドストーン連動にチェックを入れましょう。発車するタイミングでRS信号入力をすることでATOを起動させることができます。
¶ Q. 目標速度から速度が下がっているのに、ATOが加速しない
A. ATO定速運転では、目標速度に対して-10km/hになったら再加速します。
¶ Q. ATOの目標速度を下げたのに、自動で減速しない
A. ATOの目標速度変更では、加速はしてくれますが、減速はしません。「速度制限予告」を利用して減速させる必要があります。
¶ Q. ATACSが働かない
A. 進路上のレールすべてをチャンクローダーでロードさせてください。
¶ Q. 保安装置ブロック「状態変更」が動かない
A. ブロックに対してRS信号を入力してください。
¶ Q.IFTTTブロックの踏切障検が効かない
A. 検知範囲はちゃんと設定されていますか?検知範囲の座標は小数点以下切り捨てのため、端のブロックだけ検知してくれない場合は、元の数値に±1するとよいでしょう。
¶ Q.IFTTTブロックのTHENって条件分岐とかできないの?
A. 原則できません。ですが、JavaScriptを使えば条件分岐などを設定することができます。
¶ Q. IFTTTブロックにJava Scriptが登録できない
A. Release 1.7.9ではJava Scriptを登録できないバグが起こっています。Pre-Release 1.8.0-rc.1で修正されています。
¶ Q. なにかおかしい!!バグみたいなのが起こってる!!たすけて!!
A. ATSAのGitHub[2]にissueを立てましょう。ここにではなく、ATSAのGitHubにです。
¶ 関連サイト
- Kai-Z-JP/ATSAssistMod: Freedom mod ATSAssist can easily build a railway signaling equipment. Freedom mod ATSAssist can easily build a railway signaling equipment. - Kai-Z-JP/ATSAssistMod
- ATSAssistMod/document/ATSAssistMod1.4.0_Manual.pdf at master · Kai-Z-JP/ATSAssistMod
- 【ATSassistMod解説】基本的な使い方と応用例【RealTrainMod】 - YouTube 訂正箇所は字幕・コメント欄にて記載しました。また、列車状態変更の解説が抜けています…。申し訳有りません…。⚠️今回お借りした車両にはデフォルトではATSやGPS等はありません⚠️⚠️車両制作者様への問い合わせは絶対におやめください。⚠️⚠️(主にsound)著作権の関係で、運転台やスクリプトの公開予定はあ…
- 【1.7.10版 ATSassistMod解説】各種ブロック・アイテムの使い方【RealTrainMod】 - YouTube 訂正箇所は字幕・コメント欄にて記載しました。また、列車状態変更の解説が抜けています…。申し訳有りません…。⚠️今回お借りした車両にはデフォルトではATSやGPS等はありません⚠️⚠️車両制作者様への問い合わせは絶対におやめください。⚠️⚠️(主にsound)著作権の関係で、運転台やスクリプトの公開予定はあ…
Cauldron系サーバー(ThermosやMohist等)の場合、
tileentities.yml内のskip-tileentity-ticksをfalseに変更する ↩︎